Lab 28 The
Scooper/Sorter/Racer
Robot
This laboratory assignment
accompanies the book, Embedded Microcomputer Systems: Real Time Interfacing,
by Jonathan W. Valvano, published by Brooks-Cole,
copyright © 2000. The robot materials were funded by a grant from Tivioli.
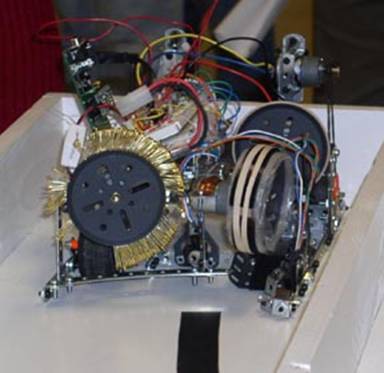
Goals • Design a
robot that can move forward/backward, turn left/right, and pick/sort balls
• Interface motors and
sensors to the 6812,
• Implement pulse-width
modulation,
• Write low-level device drivers
for the motors and sensors,
• Develop a high-level
control system,
• Use communication skills to
work effectively as team.
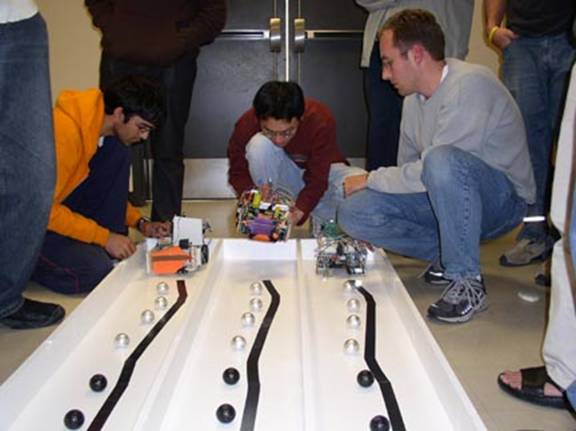
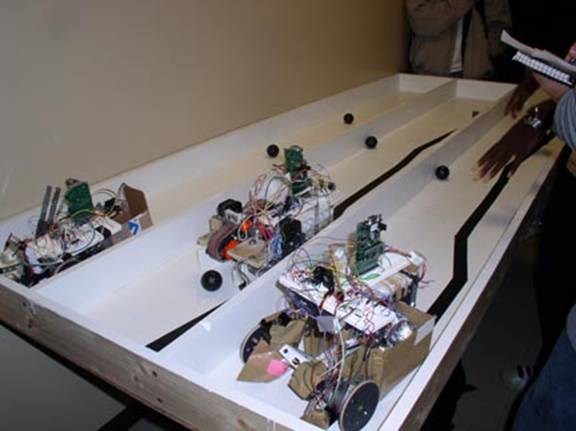
There are three lanes with walls in each of
three arenas. The ultimate goal is to collect as many aluminum-colored balls
(leaving the black ones) within the three minute time allotment, picking them
up and holding them somewhere within the robot. The lanes are approximately 12
inches wide and 8 feet long. There is a “Start Box” at one end and a zig-zag line along the length of the lane. The competition will be conducted in two
rounds. During the first round, held on
Wednesday December 1, the student robots will be divided among the three arenas,
each managed by one TA. Multiple runs
will be conducted as time permits. Each robot will get the same number of runs
and the total cumulative score will determine the rankings.
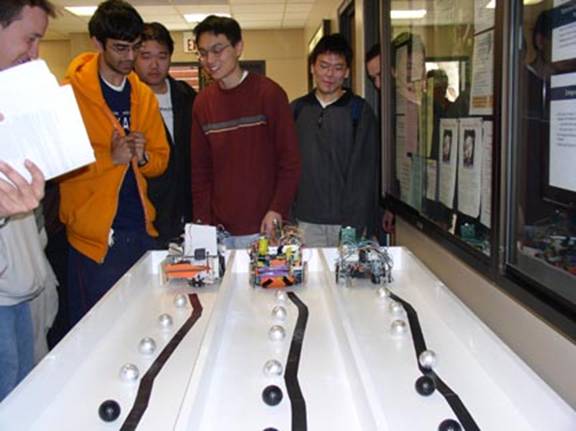
Black-colored and aluminum-colored
golf balls will be placed about 2 inches to the right of the zig-zag line. The zig-zag
line will be moved between the testing and competition phases, but all lanes
will have the same pattern during competition, and the line will not be placed
any closer than 4 inches from the side wall. Five to ten golf balls will be
placed in each lane in a fair but varying manner. The robots will then race in groups of
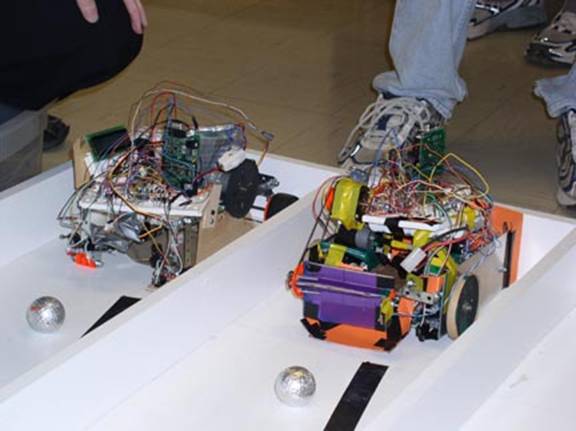
three. Each robot will begin in the
“Start Box.” All robots must completely
fit inside the 8 inch wide by 12 inch long “Start Box”, with no part of the
robot extending beyond the 8 by 12 in size limit throughout the course of the
race; there is no height restriction.
The robots will begin moving down the lane
when the timer is started. After three
minutes, all robots must stop, and at that point, the scores will be recorded.
- Each silver ball collected into a robot’s
bin will add 100 points to its score.
- Each black ball that is in the bin or has
been pushed into the “End Zone” will subtract 100 points from its score.
- The robot’s time from start to end wall in
seconds will be subtracted from its score.
If the robot has not reached the end, the
maximum 180 points will be deducted.

The balls
must be lifted off the ground (not just squatted over like a duck), and there
are no penalty points for temporarily picking up a black ball, as long as it
not being held at the end of the 3 minutes. Points are scored at the end of the
3 minute contest by counting the balls held off the ground within the robot.
All robots must behave like proper ladies and gentlemen, i.e., you are not
allowed to purposefully damage or disable the other contestant. You are allowed to use additional passive
materials not contained in the kit (e.g., wheels, gears, string, wood, metal,
plastic, wire, tape), but you are restricted to the active components (motors,
servos, sensors) from the kit. You are allowed to check out additional
quantities of the same type of component (while supplies last).










TA: Anil Kottam
TA John
Porterfield

TA Byung Geun Jun