cos(2 pi (fc + df) t ) = cos(2 pi fc t + 2 pi df t)The time-varying phase theta(t) is 2 pi df t, where df is the difference between the receiver and transmitter carrier frequencies. The phase 2 pi df t is slowly varying with time because df is a much smaller frequency compared to fc.
Carrier phase recovery notes and marker board notes for the steepest descent version of the basic Costas loop.
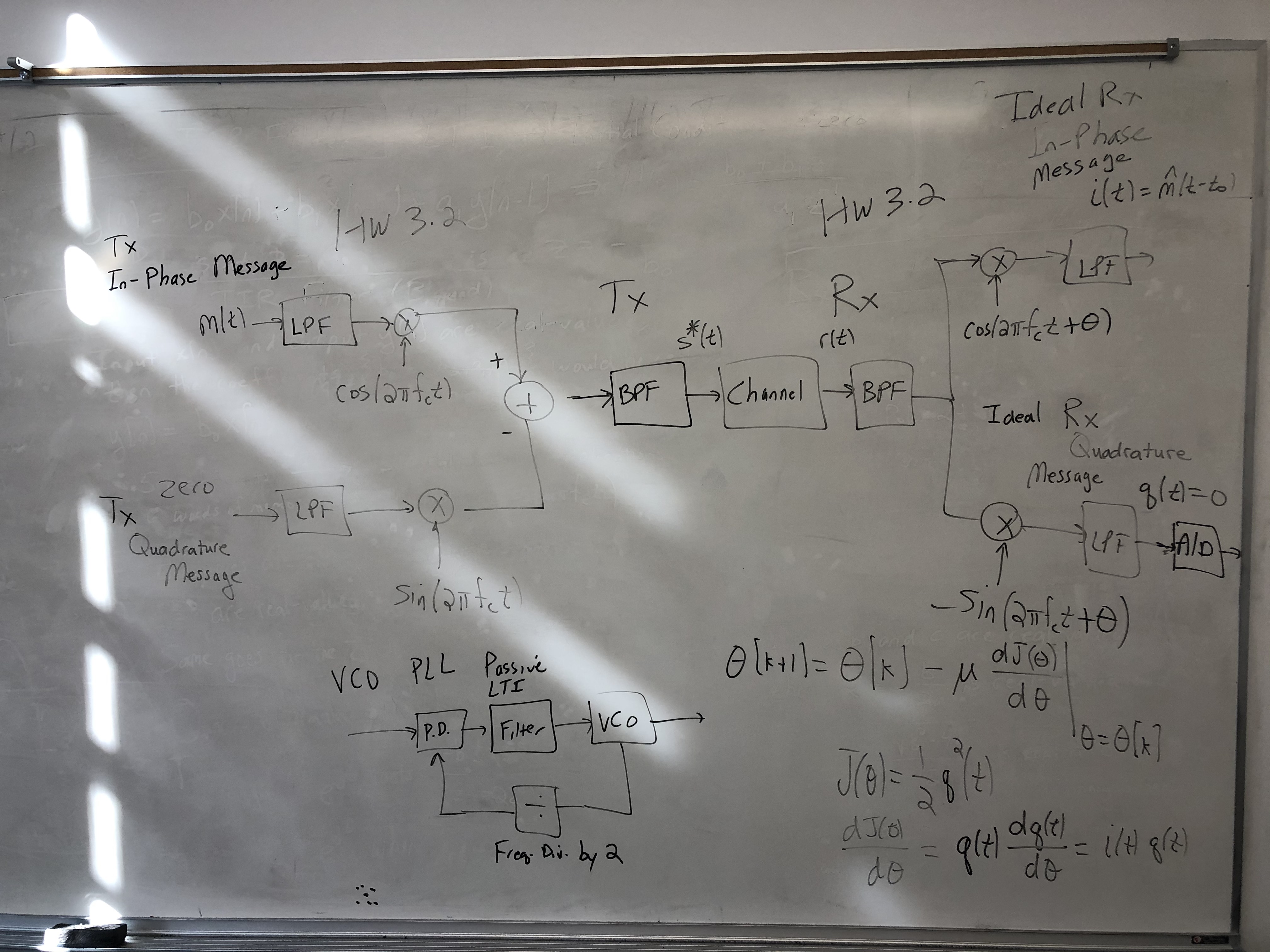
For the Costas Loop, you're asked to show that the update equation for theta[k] in Fig. 10.9 on page 208 is the same as that for Fig. 10.12 on page 211.
In solving this problem, you'll need to use trigonometric identities and an assumption that the phase theta[k] is slowly varying with time. The latter assumption implies that cos(theta[k]) is approximately constant, which allows the switching of the order of modulation and lowpass filtering in each branch.
It is a common assumption in phase-locked loops that the phase being tracked is varying slowly with time.
Homework problem 6.2 is related to the block diagram in Fig. 12.1 on page 252.
The symbol index is k and the symbol time is T. The sampling time Ts is equal to the symbol time T divided by the number of samples per symbol M.
The symbol timing offset, tau, is the offset to the actual start of the current symbol. An offset of tau - T and tau + T would be at the start of the previous and next symbol, respectively. It is okay if a symbol timing recovery algorithm converges to a timing offset of tau, tau - T or tau + T. For the latter two cases, we could adjust the timing offset by adding or subtracting T, respectively.
During the kth symbol, we can estimate the symbol timing offset, and use it to delay (if positive) or advance (if negative) the time that the (k+1)st symbol is sampled.
This specific problem uses a different objective function JFP(tau) which is a version of the fourth-order objective function that is plotted in Fig. 12.11 on page 264. The concavity of the fourth-order objective function depends on the value of the rolloff parameter, beta. For beta values of 0, 0.1, 0.2 and 0.3, the concavity matches the concavity in Fig. 12.11, whereas for beta values of 0.4, 0.5 and 1.0, the concavity is the opposite of that in Fig. 12.11. I have adapted a Matlab script from the Johnson, Sethares and Klein book to plot the concavity: myclockreccost.m. In this problem, please use beta = 0.2, and proceed with minimizing the objective function.
To set up the adaptive update equation for the symbol timing offer tau, we'll need to take the first derivative of JFP(tau) with respect to tau. The problem asks to use the approximation of the first derivative of x(tau) with respect to tau given in JSK problem 12.16(b).
There are three parts to this question.
Please see Fig. 16.12 on page 381 and read the accompanying text. Plotting symbol error rate vs. signal-to-noise ratio is a very common first step in analyzing communication system performance. This curve plots the lower bound from a formula. Another way to use this graphical representation is to simulate a communication system for different SNR settings and scatter plot the results. This could allow comparison of two equalization methods, two timing recovery methods, etc. Superimposing the lower bound from a formula on the plot shows how close (or far away) the methods are from the ideal answer.
Part (a). In digital QAM, the baseband signal is bandpass; the bandpass band is close to zero frequency; and the DC component is zero. The baseband QAM carrier frequency is small in value but greater than the lowpass pulse shape's bandwidth to create a bandpass spectrum. For a raised cosine pulse shape, the bandwidth is pulse shape is (1 + alpha) W where W is half of the symbol rate, as mentioned on Pulse Shaping & Interpolation lecture slide 7-13.
Part (b). Average and peak transmit power for 4-QAM in lecture is available on QAM Transmitter slide 15-18. For this part, please provide calculations for average and peak transmit power for 4-QAM and 16-QAM, and comment on the differences. Please compute the peak-to-average-power ratio for 4-QAM and 16-QAM.
As an example, here's power analysis for an 8-QAM constellation. With QAM symbol amplitudes of the form i[n] + j q[n], 8-QAM amplitudes could be -3d + j d, -3d - j d, -d + j d, -d - j d, d + j d, d - j d, 3d + j d, 3d - jd. The power over one symbol period is proportional to the square of the absolute value of the symbol amplitude: 10 d2, 10 d2, 2 d2, 2 d2, 2 d2, 2 d2, 10 d2, 10 d2. Taking the absolute value is needed because each symbol amplitude is complex-valued.
Part (c). What other tradeoffs are made when moving from a 4-QAM to a 16-QAM modulation scheme? Please compare the probability of symbol error vs. signal-to-noise ratio for 4-QAM and 16-QAM. Where is the signal-to-noise ratio measured in the receiver? Please see the paragraph on the homework assignment.
 bevans@ece.utexas.edu
bevans@ece.utexas.edu
{kind=link}
{kind=link}