Figure 29.1. The race will loop around the second floor.
Fall 2005 EE345M The Racer Robot
Jonathan Valvano
Department of Electrical and Computer Engineering
University of Texas at Austin
Goals
• Design a robot that can move forward/backward, turn left/right, and race
around the track,
• Interface motors and tactile, optical and ultrasonic sensors to the 6812,
• Implement pulse-width modulation,
• Write low-level device drivers for the motors and sensors,
• Develop a high-level control system,
• Use communication skills to work effectively as team.
Three robots will begin together, as shown in Figure 29.1, and
they will race to the finish line on the other side of the building. The
ultimate goal is to be the first robot to cross the finish line within the
four-minute time allotment. For robots that cross the finish line within four
minutes, scoring will be 1, 2, or 3 for first, second and third place
respectively. For robots that do not cross the finish line, scoring will be 4,
5, and 6 according to which robot is closest to the finish line at the end of
the four-minute race. For example, if one robot finishes and two do not finish,
then scores of 1, 4, and 5 will be awarded for that race. There are three “Start
Squares” and a finish line, as shown in Figure 29.1. The competition will be
conducted in two rounds. During the first round, held on Wednesday December 7,
the student robots will be divided among the three preliminary race times (10:30
am, 1 pm, and 7:30 pm), each managed by two TAs. One TA will start the race and
the other will judge the race and record the scores. Three races for each robot
will be conducted as time permits. This will allow each robot to begin a race
from all three starting positions. Let the teams be labeled
T1
T2 T3 …,
and the order represents inside, middle outside starting positions. The TA has
final authority over the race start times, and any robot not ready to begin at
the announced start time will receive a score of 6. Modifications can be made in
between races as long as the starting time is not missed. Each team can assign a
helper, who along with the judge can follow after the slowest robot around the
track. Other spectators must not enter the track during a race. If the robot
gets lost, damaged, or stuck during a race, helper may pick up the robot and
place it no closer to the finish line (as long as the helper does not position
himself or herself in front of a competitors ultrasonic sensor. The judge TA
will then assess a 30 second penalty, after which the robot can be restarted.
Sometimes, you may have
to race the same opponent twice, you may have to run two races in a row, and if
there isn’t enough time to run three races, then you may not get to start once
from each of the starting locations. Each robot will get the same number of
races, and the total cumulative score across the entire class will determine the
rankings. If not all race groups complete the planned three races, then the
scores will be scaled (3*Score/n, where n is the number of
races completed) so that all accumulated scores have a minimum of 3 (finishes
and wins all races) to a maximum of 18 (last and doesn’t finish any races). The
robot teams scoring in the top seven will be invited to the final round, which
will be conducted on Friday December 9 at 1pm. The team with the highest total
score at the finals will be exempt from the final exam.
All robots must completely fit inside the 12 inch wide by
12 inch long “Start Box”, with no part of the robot extending beyond the 12 by
12 in size limit throughout the course of the race; there is no height
restriction. The robots will begin moving when instructed by the TA. After four
minutes, all robots that are not finished must stop, and at that point, the
scores will be recorded. All robots must behave like proper ladies and
gentlemen, i.e., you are not allowed to purposefully damage or disable other
contestants. You are allowed to use additional passive materials not contained
in the kit (e.g., wheels, gears, string, wood, metal, plastic, wire, tape), but
you are restricted to the active components (motors, servos, sensors) from the
kit. You are allowed to check out additional quantities of the same type of
component (only for components that I have enough stock to allow all groups to
have it). Yes, on the bumper switches, no for ultrasonic sensors and batteries.
Figure 29.1. The race will loop around the second floor.
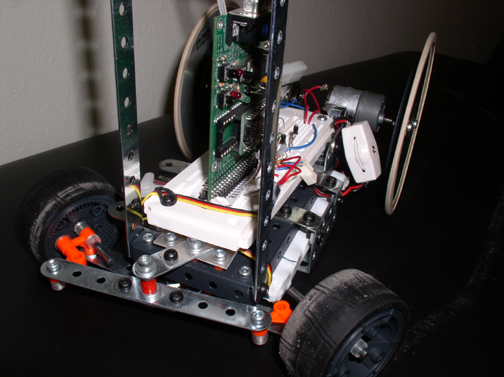
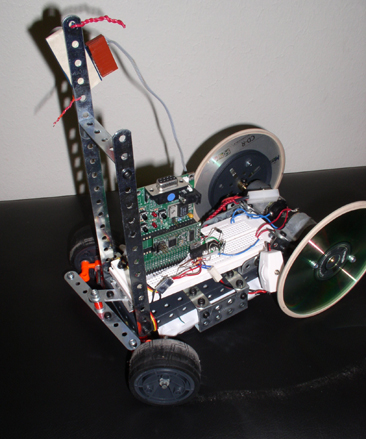
The Competitors




At the Starting Line



The Race
The Winners



Behind the Scenes